- ITERとは?
- ITERの目標と経緯
- ITERの位置づけ
- 核融合との関係
- ITERの建設地
- ITERの設計
- ITERの本体
- ITER現地の生活情報
- エクス・アン・プロヴァンス観光/生活マップ
- マノスク観光/生活マップ
- マノスクにある国際学校(EIPACA)
 量子科学技術研究開発機構
量子科学技術研究開発機構 ITER計画の状況
ITER計画の状況 ITERと産業界がロボット技術の新たな領域を切り拓く
専用ロボット、マシンビジョンシステム、力覚センシング技術は、ITERが取り組む核融合分野で最も困難な工学的課題の一つ――トカマク内部の組立と将来の保守――を可能にするために活用されています。
2026年6月1日
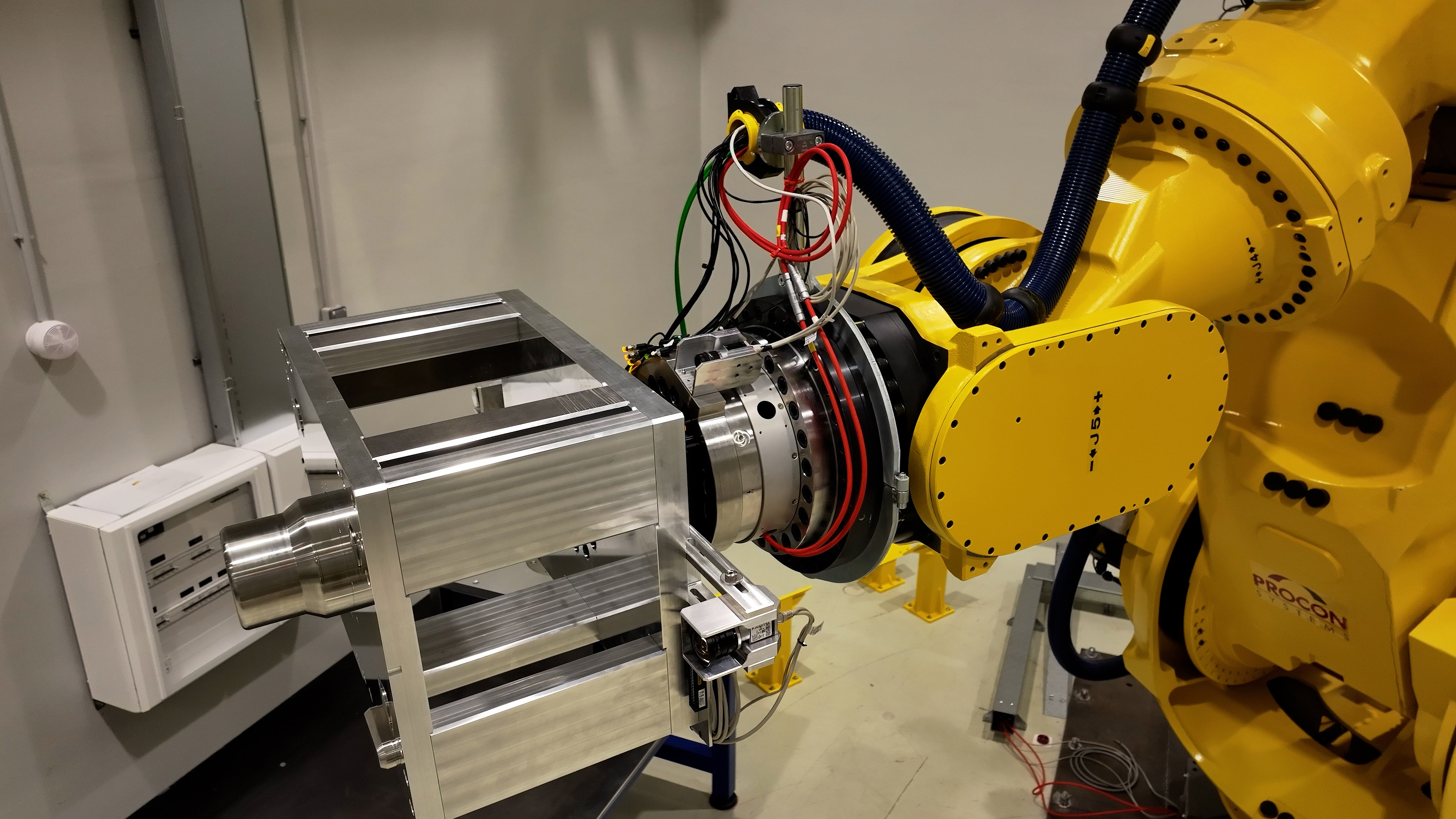
ITERが真空容器内での組立や保守に必要とするロボットシステムの多くは、現在の市場に同等の製品が存在しません。ITERの技術者たちは、この試験プラットフォーム「Godzilla(ゴジラ)」を用いて、産業界との協力により開発されている各種ツールや技術の実証試験を行っています。(写真提供:ITER機構)
ITERのトカマク内部で数トン級の機器を操作する巨大なロボットアームは、まるでSFの世界を思わせます。細長い蛇のようなマニピュレータが狭いポートを通って真空容器の奥深くまで伸び、これまで建設された中でも特に制約の厳しい産業環境の一つで、大型機器を持ち上げて所定の位置へ配置します。
しかし、真空容器内組立を担当する技術者にとって、ロボット技術は未来的な実験ではありません。それは、核融合装置の建設と将来の保守に不可欠な基盤技術です。
「私たちは、この装置を建設しながら将来への準備を進めています」
ITERのハンドリング・ロボティクス専門家であるRaphael Hery氏(以下、Hery氏)は、4月に開催された 第3回官民核融合ワークショップ の関連セッションでこのように述べました。
これらの技術開発は、真空容器内機器据付フェーズへの準備を目的とした ITER全体戦略 の一環です。このフェーズでは、多種多様な機器を限られた空間内に高精度で設置する必要があります。
また、将来的には高出力運転時の放射線レベルによって真空容器内部への人の立入りが現実的ではなくなるため、ITERの真空容器内機器は当初から遠隔操作による取扱いを前提として設計されています。
高さ4メートルのFANUC M2300iロボット。市場で利用可能な商用ロボットとしては最大級で、2.3トンの可搬能力を有しています。ITERチームは、ここに示されているブランケットモジュールの据付作業などを想定し、真空容器内組立ロボット向けに開発しているツールや技術の実証・統合試験プラットフォームとして活用しています。 (写真提供:ITER機構)
この要求は、従来の産業分野を大きく超える工学的課題を生み出しています。ブランケットマニホールドの中には高さ7.5メートルに達するものがあり、ブラブランケット遮蔽ブロックの重量は最大4トン、ダイバータカセットの重量は最大9トンにもなります。
これらの機器の多くは、狭い開口部を通過し、真空容器内の所定の場所まで搬送されたうえで、構造物や冷却系統、プラズマ対向機器が密集する環境の中で極めて高い精度で配置されなければなりません。
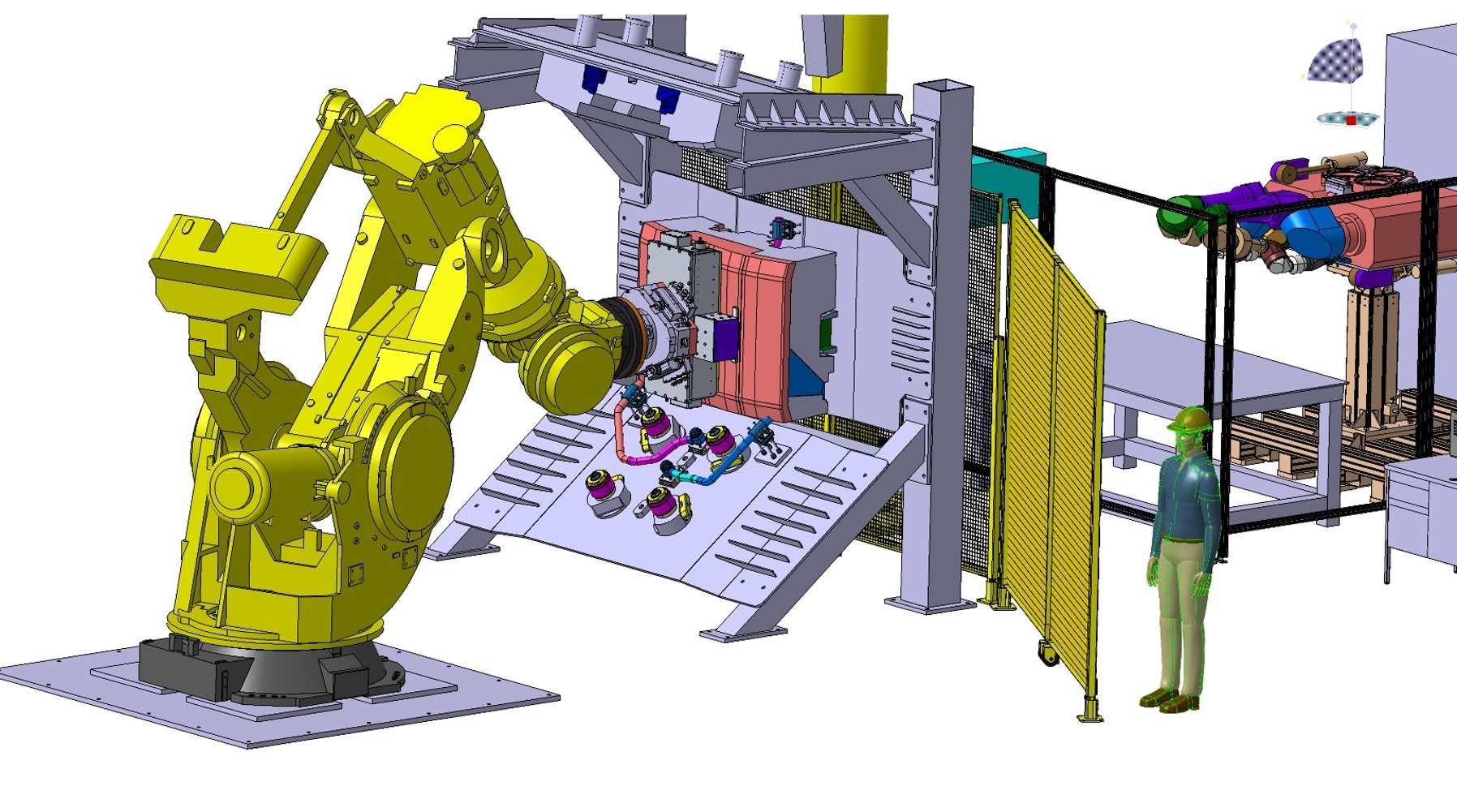
(イメージ画像提供:ITER機構)
その結果、現在の組立作業のために開発されているロボット技術は、将来の保守作業の基盤づくりにもつながっています。
核融合のためのロボット開発
これらの要求に応えるため、ITERと産業界のパートナー企業は、核融合環境向けに特化した新世代の重作業ロボットシステムを開発しています。
「私たちが使用しているシステムの多くには、現在の市場に同等のものが存在しません。」とHery氏は語ります。
その一例が、真空容器内で遮蔽ブロックおよび第一壁機器を据え付けるために設計された長尺ロボットアーム「ブランケット組立搬送装置(blanket assembly transporter)」です(イメージ画像左の灰色と黒色の装置)。
ITERではこのほかにも、専用のダイバータ組立システム、遠隔操作式のハンドリング機器、さらには組立作業期間中に作業員がロボット作業と並行して安全に作業できるモジュール式の作業プラットフォームを開発しています。
しかし、課題はロボットそのものだけではありません。ITERの技術者たちは、人間の知覚により近い能力を持つシステムも必要としています。
「一般的なロボットに欠けているのは、触覚と視覚です。」とHery氏は語ります。
この課題をきっかけとして、ITER、大学、スタートアップ企業、専門分野の産業サプライヤーとの連携はますます緊密になっています。これらの組織は協力して、既存技術を核融合用途向けに適応させるとともに、場合によってはまったく新しい技術を生み出しています。
ロボットに視覚を与える
可動範囲や可搬能力だけでは十分ではありません。作業者には、周囲の状況を極めて高い精度で認識し、それに応じて動作できるロボットが必要です。
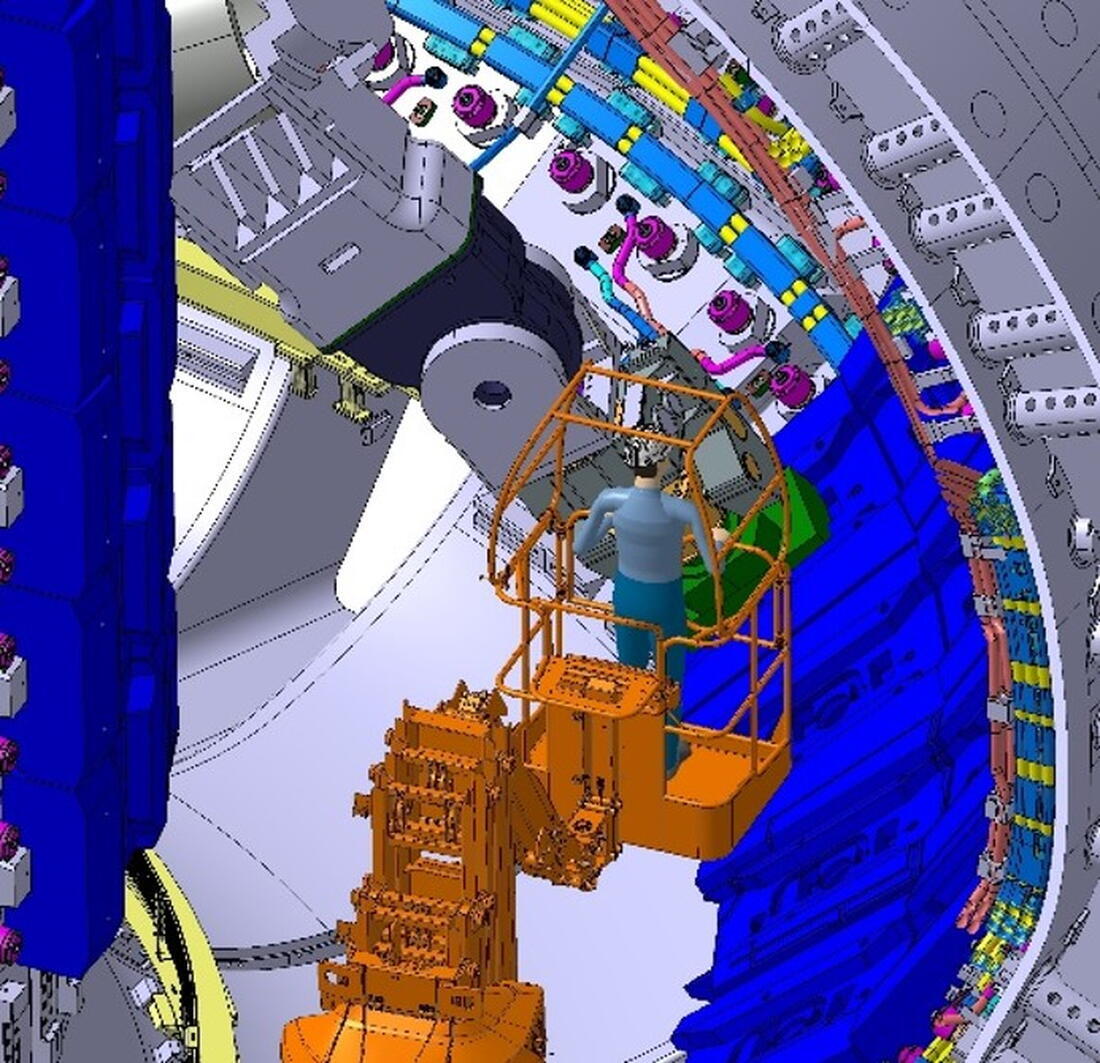
(イメージ画像提供:ITER機構)
ワークショップでは、Olli Suominen氏(以下、Suominen氏)が、もともと学術研究から生まれたマシンビジョン技術が、ITERの遠隔操作システム向けに応用されている事例を紹介しました。
Suominen氏はフィンランドのタンペレ大学で研究を開始し、その後、スピンオフ企業であるOperview社に加わりました。同社は現在、ITERと協力してロボット視覚技術を開発しています。彼らが取り組んでいる課題は、一見すると単純です。カメラ映像を通じてロボットを操作する場合、作業そのものは確認できますが、大型機器を長距離にわたって搬送する際の高精度な位置合わせははるかに困難になります。
大型ロボットアームは重荷重によって自然に変形します。数トン級の機器を把持すると、ロボットの実際の位置は理論上の位置と異なる場合があります。
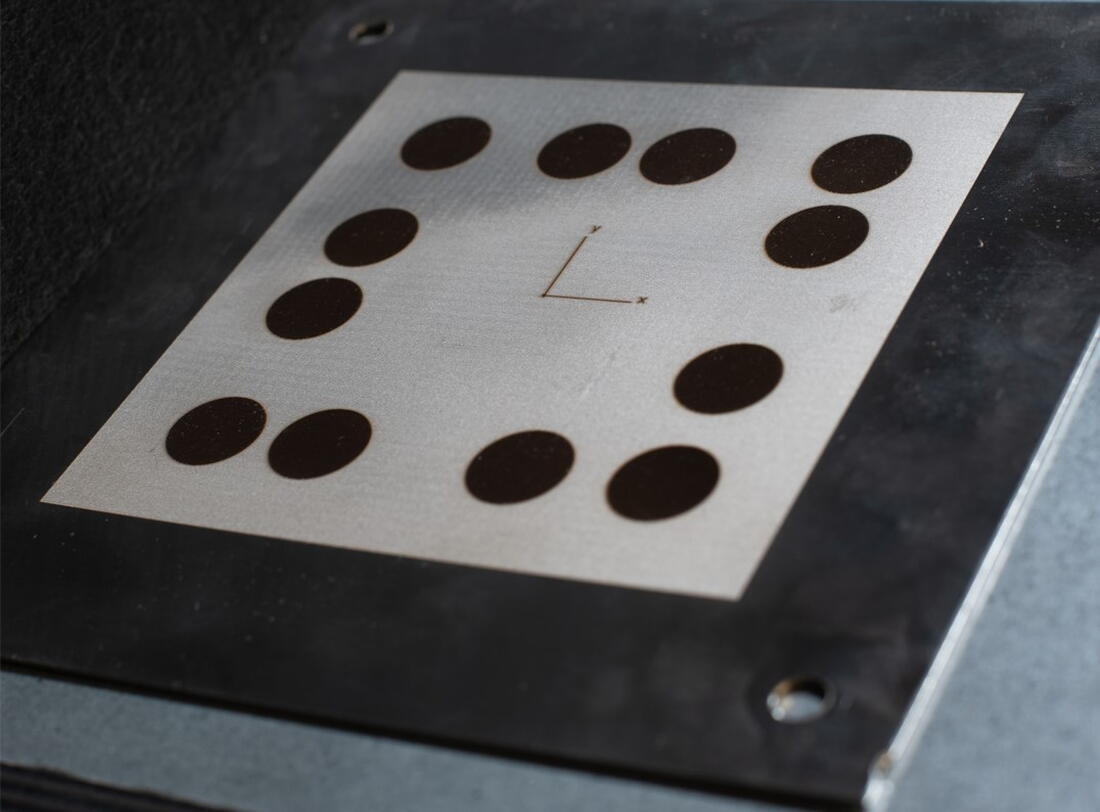
視覚システムはこうした誤差を補正し、ステンレス鋼表面にレーザーで直接刻印された光学マーカー(Pi-Tag)を利用して高精度な位置合わせを可能にします。この方法は真空環境や放射線環境にも適しています。
「カメラによってロボットに人間の目に相当する視覚を与えれば、周囲の基準点を利用して自らの正確な位置を把握できるようになります。」
Hery氏によれば、試験では約0.06ミリメートルという、人間の髪の毛の太さよりも小さい精度で位置決めできることが確認されています。
ロボットに触覚を与える
ITERの技術者たちは、組立および保守用ロボットに触覚フィードバック機能も持たせようとしています。
ITERはドイツの計測技術企業HBK社と協力し、遮蔽ブロックや第一壁機器を操作する際に、ロボットシステムが接触力を検知できるようにする専用の力覚・トルクセンサーを開発しています。
「これらのセンサーは触覚を提供することができます。」と、HBK社のTim Ahlswede氏(以下、Ahlswede氏)はワークショップで説明しました。
Ahlswede氏によると、このセンサーはロボットの制御システムが、機器が別の表面に接触したことを判断するのに役立ちます。これにより、機器を損傷させる衝突を回避するとともに、真空容器内へ伸びる長いロボットアームの動きを調整することが可能になります。
「重い物体を長いアームの先端に取り付けると、魚が掛かったときの釣り竿のようにわずかにたわみます。」

トカマク組立準備棟(Tokamak Assembly Preparation Building)の地下では、作業員がGodzillaロボットの較正作業を進めています。写真右下のテーブル上に置かれている力覚・トルクセンサーは、今後Godzillaのロボットアーム先端に取り付けて試験が行われる予定です。(写真提供:ITER機構)
力覚検知機能がなければ、重量物を解放した際に構造全体に危険な動きが生じる可能性があります。
これらのセンサーにより、制御システムは機器を切り離す前に荷重による張力を徐々に低減させることができ、振動を最小限に抑えるとともに、真空容器内での位置安定性を向上させます。
また、核融合環境はセンサーそのものにも特殊な工学的要求を課します。
HBKチームにとって最大の課題の一つは、放射線に曝される環境でも高い測定性能を維持できるシステムを実現することでした。同社は適切な構成部品を選定する前に、照射試験施設において特殊なひずみゲージ、ケーブルおよび材料の試験を実施しました。
さらに、ITERの耐震要件も新たな複雑さを加えました。センサーには通常の運転条件を大きく超える荷重にも耐えられる性能が求められています。
イノベーション・エコシステムの構築
ITERの技術者たちは通常、まず内部で基本構想や予備設計を行い、その後、産業界のパートナー企業と協力して、それらのアイデアを実際に運用可能なシステムへと発展させていきます。
「私たちは設計を理論上の性能限界まで追求します。」とHery氏は語ります。
「そして、それを現実のものにするために、専門企業と連携します。」
場合によっては、それは既存の産業技術をITER固有の要求に適応させることを意味します。また別の場合には、まったく新しい手法を開発することを意味します。
Hery氏にとって、このような協力モデルは、ITERの真空容器内組立の進展を支える中核的な要素となりつつあります。
「私たちは、サイズと可搬能力の組み合わせという点で、これまでに例のない規模のロボット技術を開発しています。」
ITERで開発されているこれらのシステムは、産業用ロボット技術を新たな領域へ押し広げるとともに、核融合環境向けに特化した新しい重作業ロボットのカテゴリーを生み出しています。
【引用元】
ITER機構サイト ITER NEWSLINE|
ITER and industry push robotics into new territory (1 Jun 2026 - Pat Brans)