- ITERとは?
- ITERの目標と経緯
- ITERの位置づけ
- 核融合との関係
- ITERの建設地
- ITERの設計
- ITERの本体
- ITER現地の生活情報
- エクス・アン・プロヴァンス観光/生活マップ
- マノスク観光/生活マップ
- マノスクにある国際学校(EIPACA)
 量子科学技術研究開発機構
量子科学技術研究開発機構 一般の方向けページのご案内
一般の方向けページのご案内  プレス発表
プレス発表

複雑環境下での重量物操作のための関節負荷最小化経路計画
2025年12月10日~12日、広島国際会議場にて開催されたSI2025 第25回計測自動制御学会システムインテグレーション部門講演会において、大阪大学 助教 清川 拓哉氏、ITERプロジェクト部遠隔保守機器開発グループ岩本拓也研究員他2名が「複雑環境下での重量物操作のための関節負荷最小化経路計画」で優秀講演表彰を受賞いたしました。
ITERブランケット遠隔保守システム(図1、2)に代表される核融合装置の遠隔保守ロボットでは、装置内部の構造物に接触しないこと(障害物回避)、重量物を扱うときにロボットの関節に過大な力がかからないこと(関節負荷の抑制)が動作生成時の重要課題となります。障害物回避については、一般に用いられるランダムサンプリングベースの動作生成アルゴリズムでも実現できる一方、関節負荷の小さい動作を生成する仕組みは十分に検討されていませんでした。
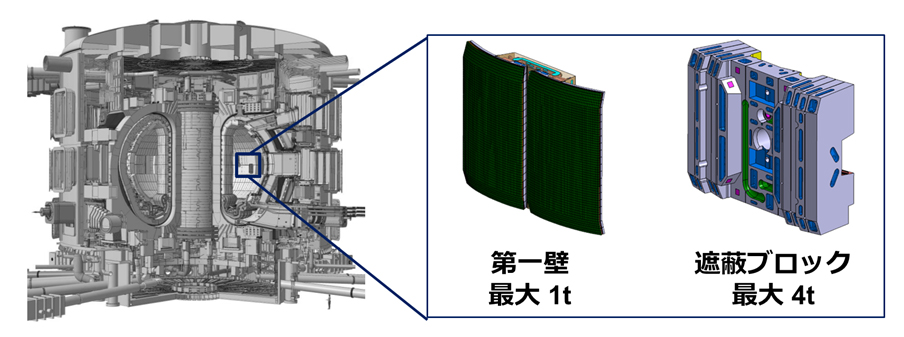
図1 ITERブランケット遠隔保守システムの保守対象(ブランケットモジュール)
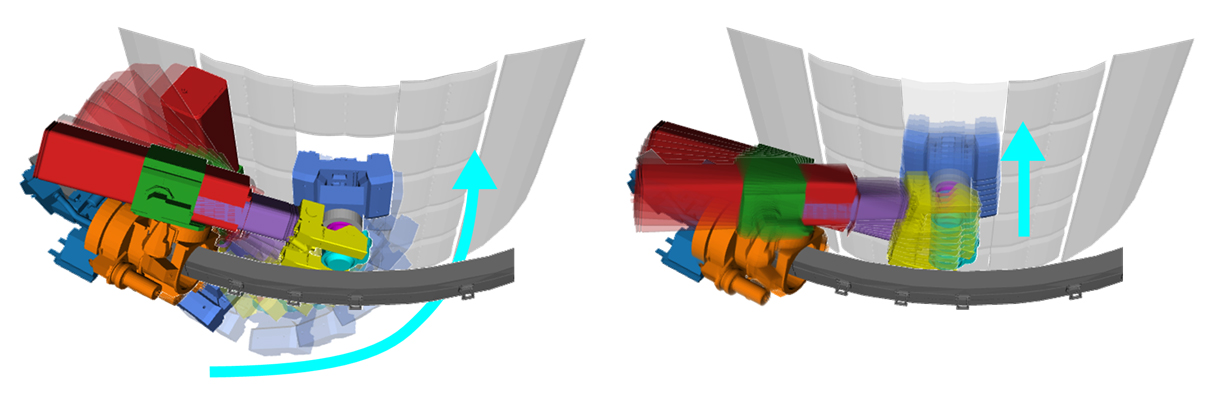
図2 ITERブランケット遠隔保守システムによる設置動作イメージ
受賞の対象となった一連の開発では、既存のランダムサンプリングベースの動作生成手法をベースに、「障害物領域」と「関節負荷が過大となる領域」をサンプリング対象から除外することで、関節負荷の抑制と障害物回避を両立可能なロボット動作生成を効率的に行うアルゴリズムを実装しました。さらに既存手法と比較し、関節負荷が実際に抑制されることを確認しました(図2、3)。
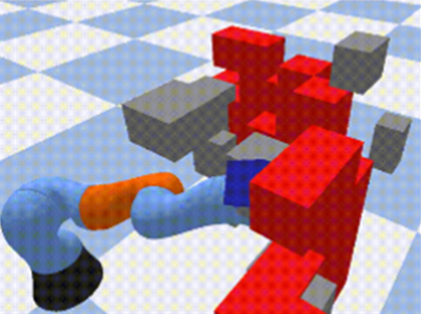
図3 アルゴリズムの検証に使ったモデル

図3 従来アルゴリズムとの関節負荷比較
グループとして今後、AI技術等との組み合わせによって、より効率的なロボット動作生成を行うためのアルゴリズム開発を進めることで、核融合遠隔保守ロボット技術発展へ貢献できるよう尽力していきたいと思います。