- ITERとは?
- ITERの目標と経緯
- ITERの位置づけ
- 核融合との関係
- ITERの建設地
- ITERの設計
- ITERの本体
- ITER現地の生活情報
- エクス・アン・プロヴァンス観光/生活マップ
- マノスク観光/生活マップ
- マノスクにある国際学校(EIPACA)
 量子科学技術研究開発機構
量子科学技術研究開発機構 一般の方向けページのご案内
一般の方向けページのご案内  プレス発表
プレス発表
令和2年度 日本原子力学会核融合工学部会賞を受賞

■ 令和2年度 日本原子力学会核融合工学部会賞を受賞
令和2年9月17日にオンライン開催された日本原子力学会2020年秋の大会 核融合工学部会第55回全体会議において、量研 核融合エネルギー部門 那珂核融合研究所 ITERプロジェクト部 遠隔保守機器開発グループの丸山孝仁主任研究員が「ITER遠隔保守装置における故障事象の特定及びレスキュー技術の確立」で「核融合工学部会賞」を受賞しました(図1、図2)。
今回の受賞は、南仏で建設が進められているITERにて運用されるブランケット遠隔保守装置について、故障事象を特定するとともに、故障から遠隔保守装置を復旧するためのレスキュー技術を開発し確立した成果が評価されたものです。
ブランケット遠隔保守装置は、ガンマ線環境であるITER真空容器内で運転される大型のロボット装置です。ガンマ線は、真空容器内への人間のアクセスを不可能とするとともに、遠隔保守装置の故障の原因にもなります。遠隔保守装置が真空容器内で故障し引き揚げられなくなった場合、ITERそのものが運転できなくなります。このような事態を避けるため、発生しうる故障を洗い出し、想定される故障事象において真空容器から遠隔保守装置を引き揚げられるようにする技術の開発が必要となります。
受賞の対象となった一連の研究開発では、信頼性ブロックダイアグラムによるシミュレーションにより故障事象を洗い出すとともに、故障部を外部から駆動するレスキュー手法を考案し(図3)、さらに考案手法を実現可能とするためのレスキューツール(図4)を開発し試作試験することで、レスキュー技術を確立しました。
今後は、レスキュー技術を反映したブランケット遠隔保守装置の調達を円滑に進めるとともに、さらに装置の信頼性を高めるためロボット制御技術の研究開発を実施し、ITERプロジェクト成功の一助となることを目指します。
図1 「核融合工学部会賞」を受賞した丸山孝仁主任研究員

図2 オンライン授賞式の様子
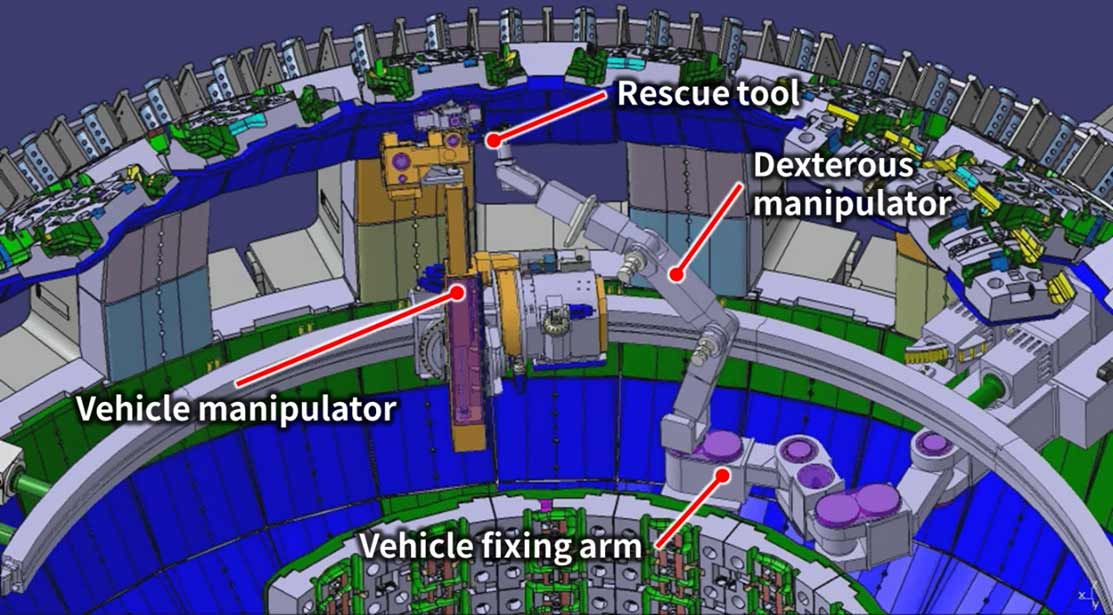
図3 考案したレスキュー手法。
故障した部位(ここではVehicle manipulator先端部の駆動軸)に、
レスキュー用のマニピュレータ (Dexterous manipulator) を用いて
レスキューツール(Rescue Tool)を設置することで、故障した軸を外部から駆動する。
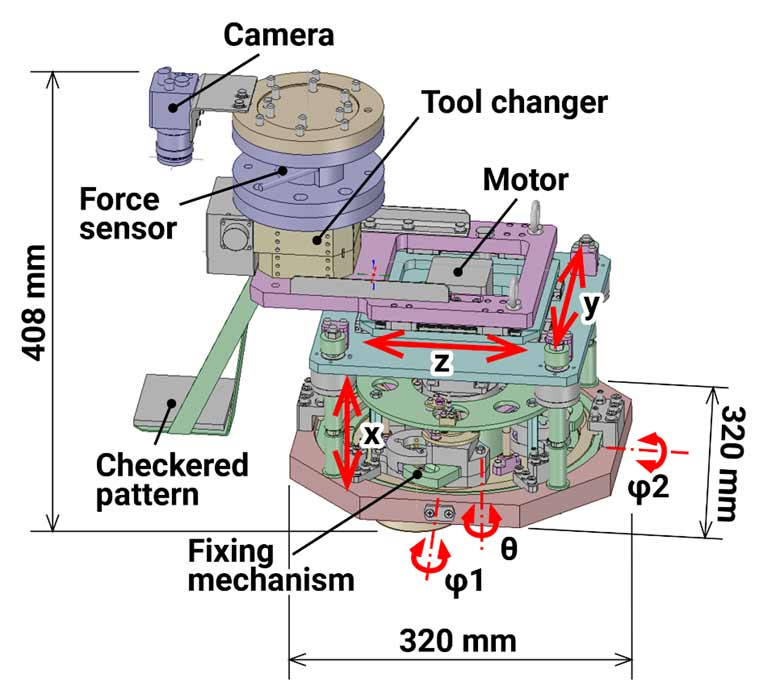
図4 開発・試作したレスキューツール。
駆動用のモータのほか、駆動レンチを嵌合させるための
6自由度コンプライアンス機構 (x, y, z, φ1, φ2, θ) を有する。